均衡負載rosSEARCH AGGREGATION

回答:一、什么是負載均衡當單個節點的服務,無法支持當前的大量請求時,我們會部署多個節點,即所謂的集群,此時要使每個節點收到的請求均勻的算法,這個策略就是所謂的負載均衡了。負載均衡常見的負載均衡算法,有權重隨機、Hash、輪詢。1.權重隨機這個是最簡單,也是最常用的負載均衡算法,即每個請求過來,會隨機到任何一個服務節點上,主流的rpc框架Dubbo,默認使用基于權重隨機算法。2.Hash可以將客服端即請求...
 FrancisSoung
|
1269人閱讀
FrancisSoung
|
1269人閱讀

...務的快速配置,是邊緣計算中的一 個核心問題。 3)負載均衡。邊緣計算中,邊緣設備產生大量的數據,同時邊緣服務器提供了大量的服務.因此,根據邊緣服務器以及網絡狀況,如何動態地對這些數據進行調度至合適的計算服務...
Background 做 ROS 相關開發的,應該都知道 ros msg 有個非常大的槽點: ros msg 擴展性較差,即如果 msg 的字段發生變化,則程序前后版本不兼容 因此,google 的 protobuf 相對就是一個更好的選擇。在擁有更好的擴展性的同時,還能...
...實驗的安裝方式,具體所有的安裝方式請查看:http://wiki.ros.org/turtlebot... 1、安裝 sudo apt-get install ros-indigo-turtlebot ros-indigo-turtlebot-apps ros-indigo-turtlebot-interactions ros-indigo-turtlebot-simulator ros-i...
...irtualbox.org/wi...。 在Host節點的操作系統上,可以選取RancherOS,我們的目標是快速體驗新特性,而Rancher Labs在Rancher和RancherOS的相互兼容性上是做了大量測試的,這樣可以避免我們少進坑,直接體驗新特性。RancherOS下載地址:https://...
...器人開發的難度。主要的機器人專用中間件有RT 中間件和ROS 兩種,下面來具體看一下。 RT 中間件 RT 中間件(RT-Middleware)是一種軟件平臺規格,它的用途在于把構成機器人的各個要素進行軟件模塊化,進而整合成機器人系統。 ...
...untu 14.04 LTS 64bit 軟件:sublime text 3 ;pycharm 錯誤情況 import rospy ImportError: No module named rospy 問題描述 在pycharm和sublime下無法import rospy等模塊,但是在Terminal下用命令行就可以正常運行,經過分析,原因為 /opt/ros/indigo/lib/p...
1、開啟你的turtlebot機器人 參考:http://wiki.ros.org/turtlebot... roslaunch turtlebot_bringup minimal.launch --screen 查看底盤kobuki(create)是否啟動 ls -n /dev | grep kobuki 輸出結果如下說明kobuki啟動 .............. kobuki -> tty...
...m.sh文件ming要一致否則無法成功)在下面輸入: #!/bin/bash roslaunch turtlebot_bringup minimal.launch 簡單的命令行操作完畢,下次我們再啟動機器人的時候直接./mm.sh即可運行機器人的啟動程序。 也許有人會說你這個方法只是適合單窗口的...
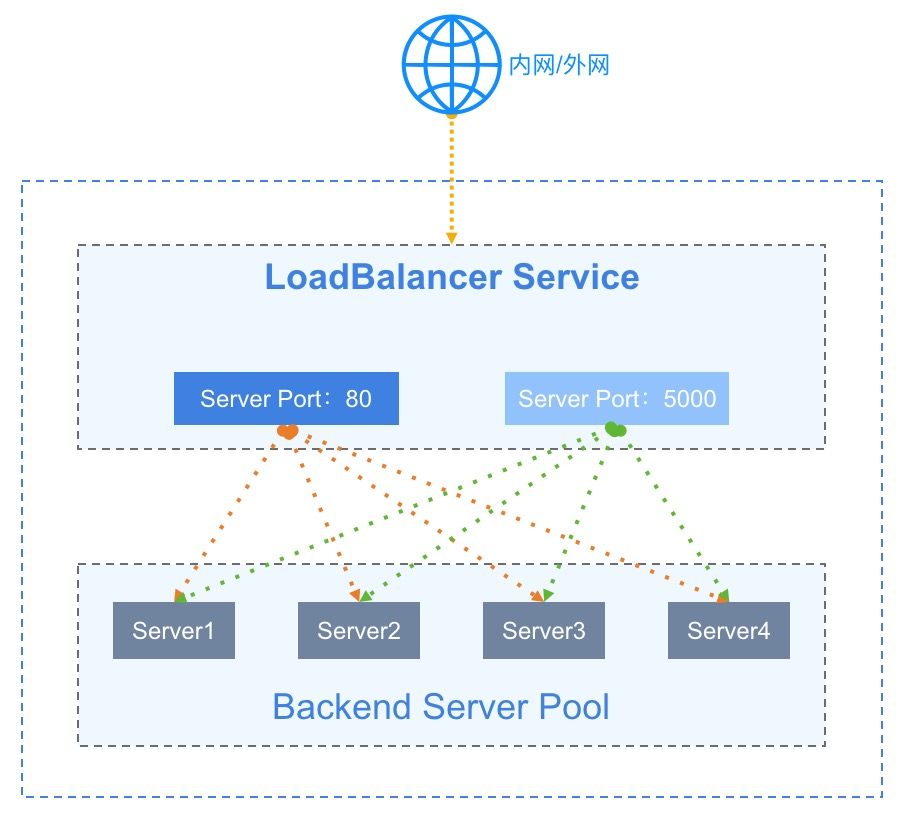
4.7.1 負載均衡概述負載均衡( Load Balance )是由多臺服務器以對稱的方式組成一個服務器集合,每臺服務器都具有等價的地位,均可單獨對外提供服務而無須其它服務器的輔助。平臺負載均衡服務(簡稱 ULB—UCloudStack Load Balance)...
ChatGPT和Sora等AI大模型應用,將AI大模型和算力需求的熱度不斷帶上新的臺階。哪里可以獲得...
大模型的訓練用4090是不合適的,但推理(inference/serving)用4090不能說合適,...
圖示為GPU性能排行榜,我們可以看到所有GPU的原始相關性能圖表。同時根據訓練、推理能力由高到低做了...
 趙春朋
趙春朋 曹金海
曹金海 Lycheeee
Lycheeee yy13818512006
yy13818512006 王偉廷
王偉廷